Автоматизированная система для контроля перемещения робота в пространстве с препятствиями
На последнем курсе обучения в университете я решил помочь своей кафедре создать модель которая бы имитировала реальную систему, применяемую для сканирования деталей с нескольких сторон. Основной целью работы был поиск подходящего алгоритма для перемещения частей робота по заданному маршруту без столкновений друг с другом и с предметами окружающего мира.
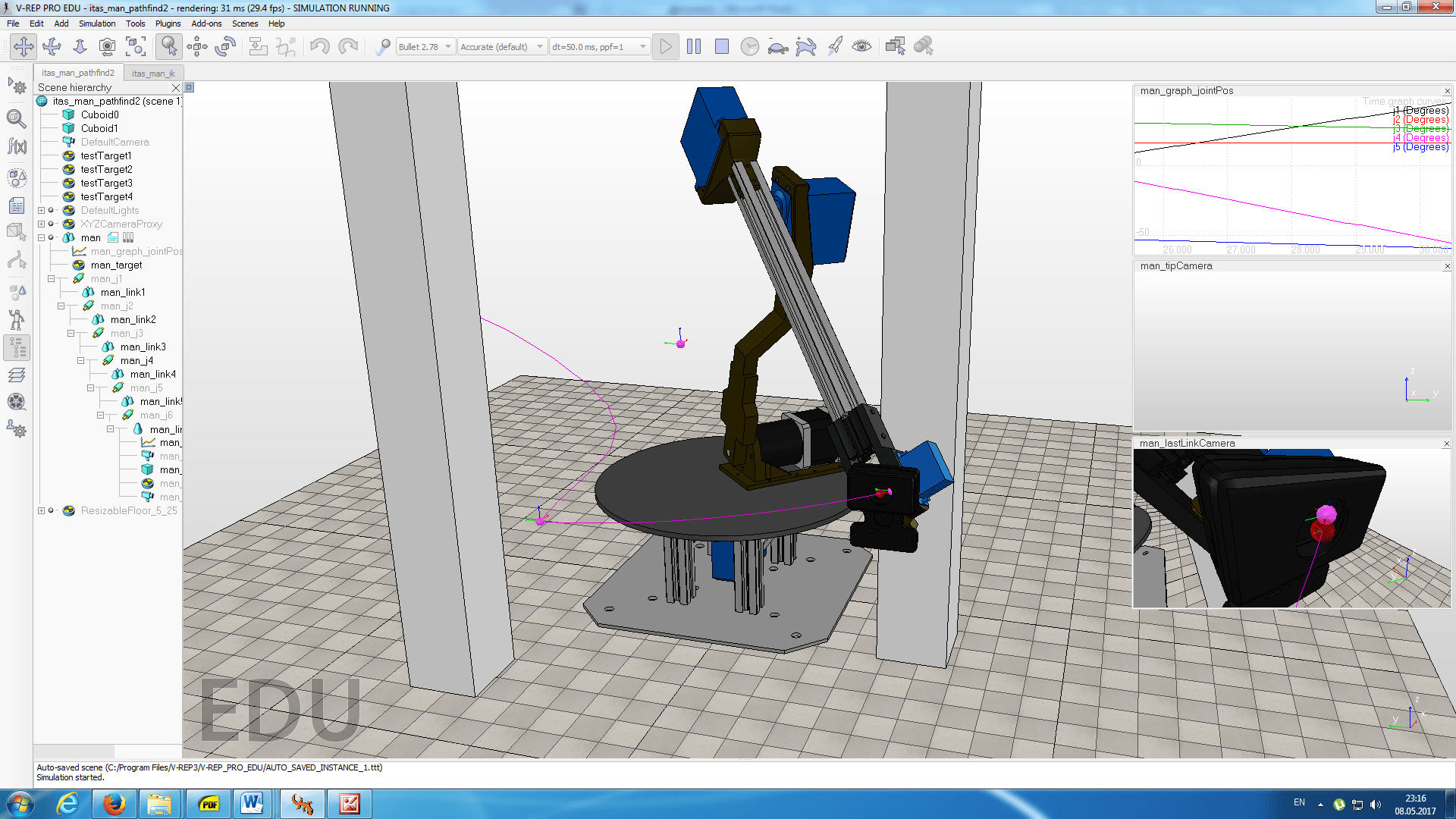
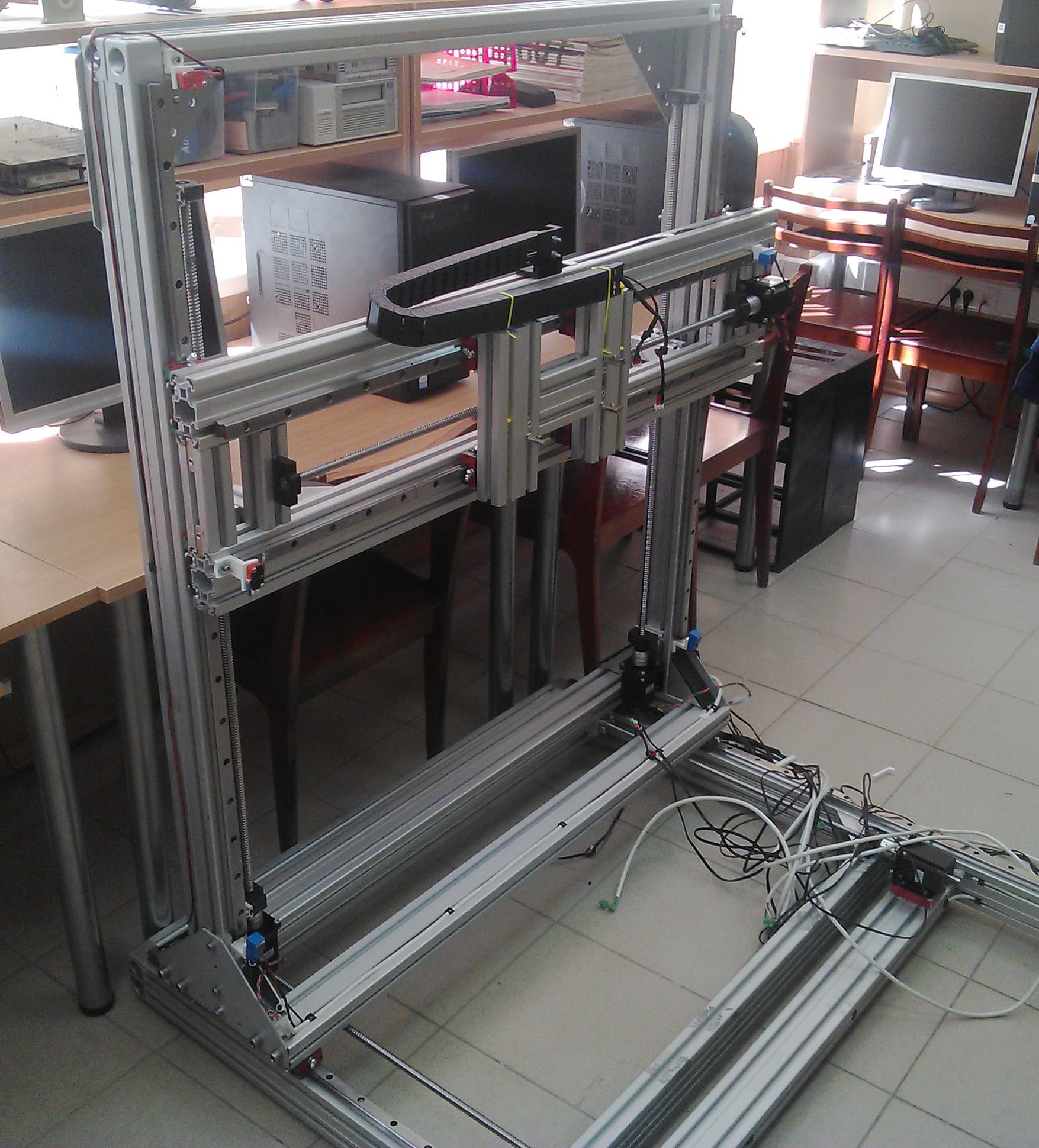
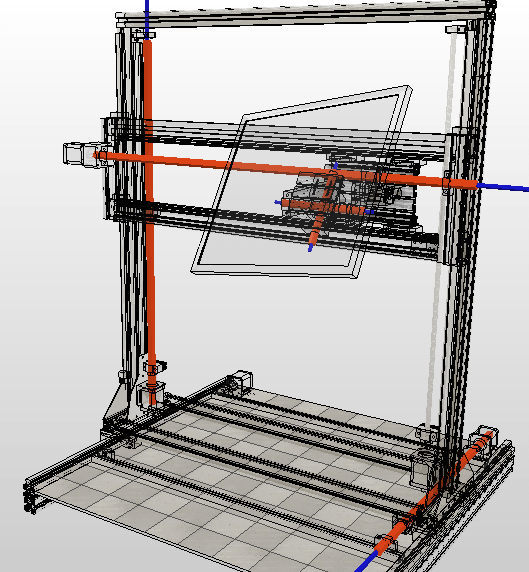
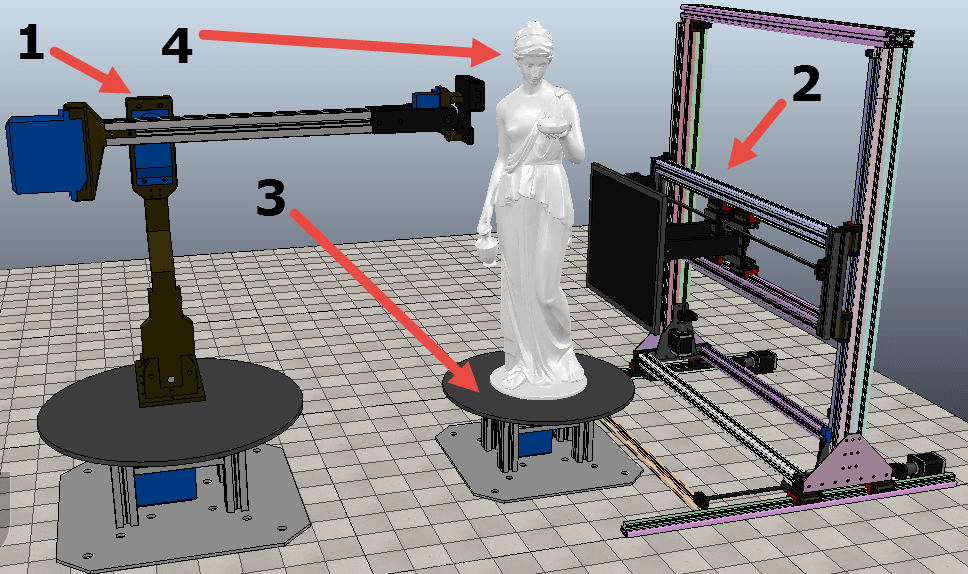
Я использовал систему V-REP для разработки моделей и решения задач прямой и обратной кинематики совместного перемещения двух роботов. На изображении в выше представлена эта 3D-модель состоящая из двух основных роботов - робота-манипулятора (обозначен “1”) и робота-рамки (“2”). Также там представлены робот-подставка (“3”), который поворачивает сканируемую деталь (“4”).
Возможно эта работа не для IT и разработчика, но благодаря ей я изучил много научной литературы, что позволило мне сделать хорошую научно-исследовательскую работу, которую я представил научному комитету в университете на защите.
Также я изучил основы языка программирования Lua.
Я выгрузил исходники кода проекта на Github. А в данном видео вы можете увидеть процесс сканирования детали: