Computer-aided system to control a moving of a robotic system in an environment with obstacles
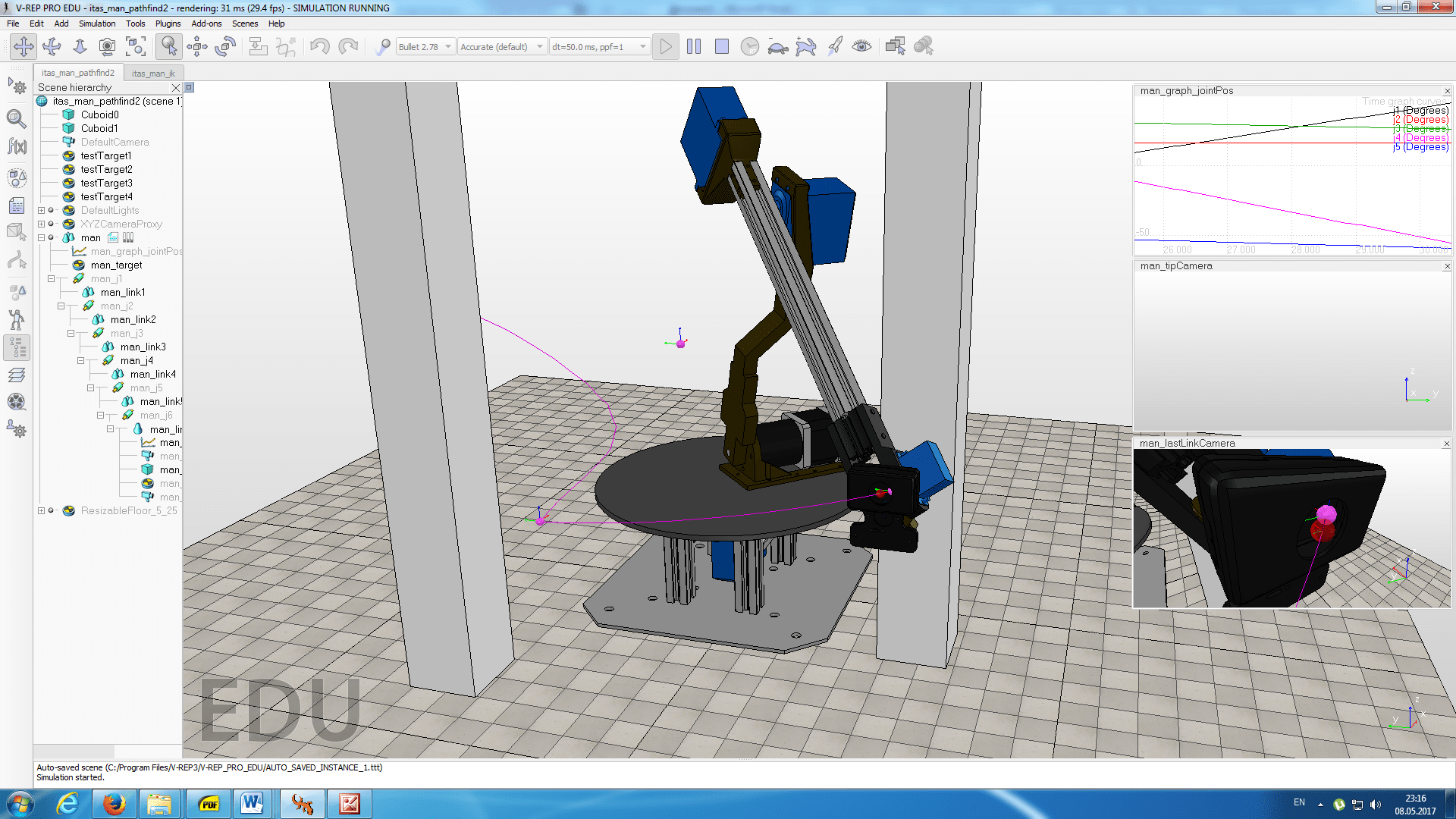
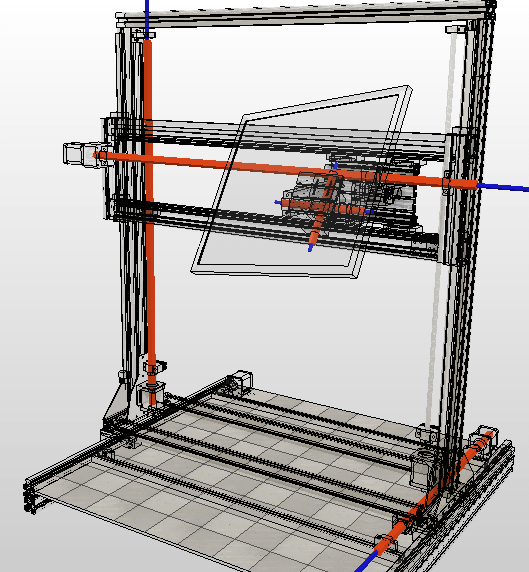
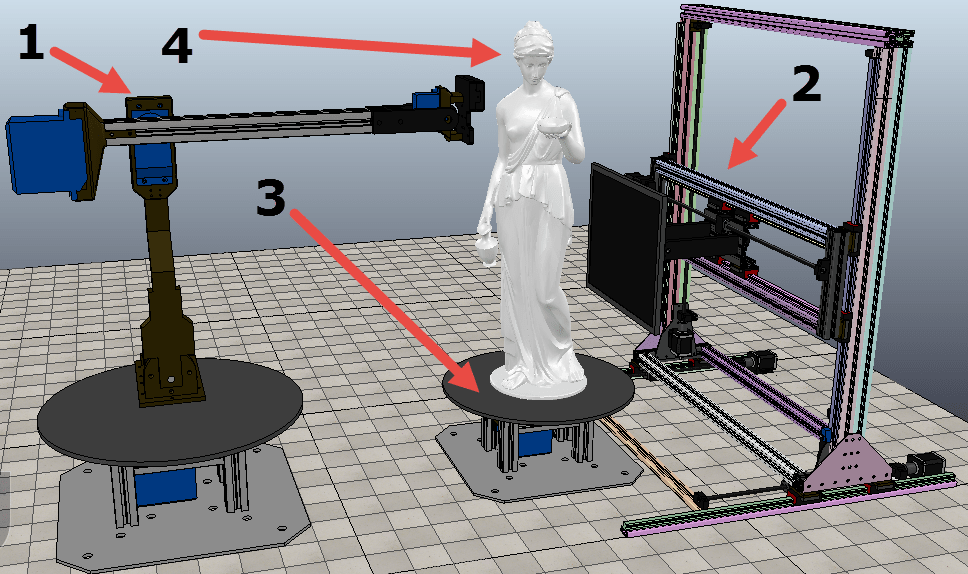
In my last course of the University, I’ve decided to help my department to create a model that will simulate the real system for scanning details in many angles. The main purpose of the work is to find an algorithm to move robots by path without collision to each other and the environment. I use V-REP system to design models and to solve inverse and forward kinematics tasks of together motion two robots. In the picture gallery is present models are consisting of two main robots is a manipulator (in the picture it is a “1”) and a frame robot (“2”). Also has a table robot (“3”) that rotates a detail (“4”).
Maybe it is not a work for IT or programmer but I was exploring many science articles and approaches, studying it to make a good thesis of a scientific work and presents it to a commission of the University. And also I’ve learned the basics in Lua language.
I’ve uploaded the source code of the project into Github. Also you can view the video of a scanning process of a detail.